The following is the report for my InterDisciplinary Project (IDP) at TUM. I had the opportunity to dabble1 around with a Starlink terminal, for a couple of semesters, as the fancy title suggests.
Abstract
Starlink is a novel technology designed to extend internet connectivity to remote and underserved regions worldwide by leveraging a Low Earth Orbit (LEO) satellite constellation. This report serves as a comprehensive documentation of our work and findings related to Starlink-based internet connections.
After introducing the fundamental principles of LEO satellite-based internet connectivity and the technologies to locate such satellites, this report proceeds to an analysis of whether Starlink-based connections result in characteristic packet routing behaviors when reaching geographically sparse targets when compared to normal cabled connections.
Furthermore, an analysis is conducted to assess whether the physical layer influences latency. The report subsequently proposes a schema to evaluate satellites within the line of sight of a Starlink dish. Analysis starts with the development of a script aimed at identifying occurrences of satellite handovers; afterward, this data is used to try to establish a correlation between bandwidth fluctuations and satellite handovers.
Our findings seem to indicate such handovers do not happen in a specific pattern and do not cause a drop in bandwidth, thereby suggesting a high level of connection stability from an end-user perspective.
Throughout the course of our research, we developed tooling to interact with the dish and run measurements.
Introduction and Background
In this brief section, we introduce the topic of our research and some of the background knowledge needed to fully understand further developments. Additionally we present literature we examined while performing our measurements.
Introduction
Starlink is the largest Low Earth Orbiting (LEO) satellite constellation with more than 4000 satellites currently orbiting around Earth. It is managed by SpaceX, and its scope is to bring Internet broadband connection to the most remote and rural areas in the world while also serving people living in residential districts, currently typically using a cabled link.
LEO satellites orbit around 550 kilometers from Earth, so naturally, LEO connections have a lower latency than other satellite-based connections. SpaceX claims latency is around approximately 25 milliseconds; however our experiments show that it is often a little higher (approximately 35 milliseconds). It is, though, worth mentioning it might be possible that using laser links is faster than fiber on Earth due to the higher speed of light in vacuum and shorter path than undersea fiber, as reported by Elon Musk himself.
Starlink might not be the best solution for people living in residential areas, as their place is covered by a faster cabled connection and it is probably way cheaper as the infrastructure is more straightforward to maintain. As of October 2023, Starlink costs 65 USD per month with a one-time hardware cost of 450 USD.
Satellite-based Internet connections have been around for several years. They are typically based on geostationary satellites (GEOSAT), orbiting at about 35,000 kilometers. It is thus natural to expect higher latency when comparing GEOSAT connections to cabled Internet connections; the former usually averages around 35ms of latency, while latter usually experiences about around 600 millisecond; or in other words, Starlink averages 70 RTTs in the time a GEOSAT connection is able to send a single packet back and forth.
From a customer perspective, using Starlink is straightforward. After receiving the hardware, the only needed step is to plug the satellite dish and position it in a place with clear access to the sky. After that, connecting the provided router is enough to browse the Internet using different devices.
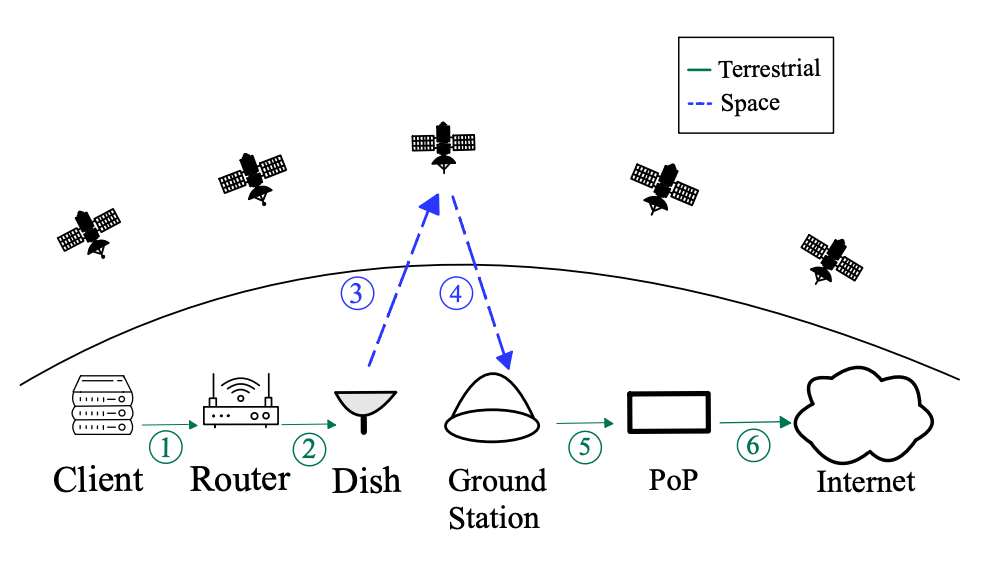
On a more technical note, packets sent from a local device go through the dish, they are relayed to a nearby satellite, and they are sent to a ground station in view; from that point onwards, packets are routed normally through the Internet. The figure below shows a sample ground station, it's essential to note that the ground station must be positioned close to the antenna (dish) to ensure that the satellite can communicate with it effectively.
 A sample ground station, from https://archive.ph/1JGMq
A sample ground station, from https://archive.ph/1JGMq
SpaceX is also employing Inter Satellite Links, allowing a dish not in proximity of a Ground Station to communicate by routing packets to different satellites and relaying them back to Earth as soon as it is deemed convenient. This is crucial for the maritime version of the Starlink kit since it is safe to assume oceangoing ships will often be in such condition.
 Our Starlink dish, located in Garching, München, DE
Our Starlink dish, located in Garching, München, DE
 Basic Starlink working, from Izhikevich et al.2
Basic Starlink working, from Izhikevich et al.2
SpaceX is currently the most popular LEO-based Internet Service Provider. However, other similar projects exist, such as OneWeb and Amazon Project Kuiper. The former is more enterprise and government-focused, while the latter aims to be a Starlink competitor, with the first satellite launches starting now.
The future is bright for LEO-based ISPs; however, we might soon encounter some problems. Starlink alone has currently 4974 satellites in orbit, and Project Kuiper plans to launch 3236; these two constellations alone account for more than 8000 satellites. This is increasing the overall brightness of the skies, and debris proliferation will become more and more of a concern, as reported by Barentine et al.
Background
We will now introduce some concepts we will use later. We briefly describe the gRPC protocol, as it is used by the dish to communicate diagnostics and statistics to customers, before describing Two Line Element Sets, the data format used to encode the satellite's positions.
For the measurement parts, we are using standard Unix tools, like ping, traceroute, iperf, and we are working with Python for scripting purposes.
gRPC protocol
gRPC is an RPC (Remote Procedure Call) framework from Google. It is the dish API's protocol and is massively employed across different fields, especially in microservices architectures.
gRPC uses protocol buffers (protobufs) both as Interface Definition Language and as the format for message interchange; consequently, every client needs to have a stub providing the server's accessible methods. Typically this involves generating some .proto files (stubs), but an alternative approach called Server Reflection is employed. With Server Reflection, it is possible to dynamically query the API to retrieve a list of the accessible methods.
Using a tool like grpcurl, it is possible to inspect the service; furthermore, it is easy to use the gRPC Python library to develop scripts.
Two-line Element Sets
Two-line Element Sets (TLEs) is a widely used ASCII-based data format to encode the position of orbital elements for a given point in time3. We work with TLEs using the Skyfield Library, an elegant astronomy library for Python. Check listing below for a sample script to localize a satellite's position given the Satellite Name. A complete list of Starlink satellite names can be found at https://celestrak.org/NORAD/elements/gp.php?GROUP=starlink. SATNAME is a unique identifier.
from skyfield.api import load, wgs84
stations_url = "https://celestrak.org/NORAD/elements/gp.php?GROUP=starlink&FORMAT=tle"
satellites = load.tle_file(stations_url)
print("Loaded", len(satellites), "satellites")
by_name = {sat.name: sat for sat in satellites}
satellite = by_name["STARLINK-1007"]
# year, month, day, hour, minute, second
ts = load.timescale()
t = ts.now()
a = satellite.at(t)
lat, lon = wgs84.latlon_of(a)
print("Latitude:", lat)
print("Longitude:", lon)
The following is a sample TLE for Satellite 1007.
STARLINK-1007
1 44713U 19074A 23239.65120160 .00022666 00000+0 15354-2 0 9991
2 44713 53.0553 19.2809 0001296 68.3392 291.7735 15.06406564209327
Knowing a satellite's position at any given time is a very powerful mechanisms, which allows us to restrict the subset of satellites the dish may be connected to. It is worth noting that previously, it was possible to call the dish_get_context or similar methods on the API to retrieve such information, as reported by this Reddit user.
Unfortunately, these methods now either return a PermissionDenied error or are deprecated.
Related work
Being Starlink a novel technology the existing body of research is somewhat limited, but papers and some tools are in development. We created some scripts to work with the dish and to perform some measurements, they are available at https://github.com/rcastellotti/idp.
From a research perspective, different works provide more insights into Starlink --- papers like 4 focus on describing the infrastructure Starlink uses. In contrast, Izhikevich et al.2 illustrate a novel approach to make measurements simpler and cheaper, and Kassem et al. focus on running some client-side measurements with a browser extension.
Recent work has been carried out on the hardware side, by Wouters while Ramponi focuses on the firmware perspective and offered valuable insights into the gRPC API.
gRPC API
Our first approach to the dish is through the web UI reachable at 192.168.100.1; we discover it is getting data from a gRPC API running directly on the dish, so we decide to spend some time documenting the available methods we could later use to gather useful additional information.
The server-reflected gRPC API is running on the dish; we can access it by querying it at 192.168.100.1:9200 using grpcurl, a sample query to retrieve downlink throughput is:
rc@gnolmir:~$ grpcurl -plaintext -d '{"get_status":{}}' 192.168.100.1:9200 SpaceX.API.Device.Device/Handle
{
"apiVersion": "10",
... (output omitted)
}
It is then possible to use jq to extract the needed fields. We can use the following command to describe the available services:
rc@gnolmir:~$ grpcurl -plaintext 192.168.100.1:9200 describe
SpaceX.API.Device.Device is a service:
service Device {
rpc Handle ( .SpaceX.API.Device.Request ) returns ( .SpaceX.API.Device.Response );
rpc Stream ( stream .SpaceX.API.Device.ToDevice ) returns ( stream .SpaceX.API.Device.FromDevice );
}
grpc.reflection.v1alpha.ServerReflection is a service:
service ServerReflection {
rpc ServerReflectionInfo ( stream .grpc.reflection.v1alpha.ServerReflectionRequest ) returns ( stream .grpc.reflection.v1alpha.ServerReflectionResponse );
}
Then, describe the single service using the following:
rc@gnolmir:~$ grpcurl -plaintext 192.168.100.1:9200 describe SpaceX.API.Device.Request
SpaceX.API.Device.Request is a message:
message Request {
uint64 id = 1;
string target_id = 13;
uint64 epoch_id = 14;
oneof request {
.SpaceX.API.Device.SignedData signed_request = 15;
.SpaceX.API.Device.RebootRequest reboot = 1001;
.SpaceX.API.Device.SpeedTestRequest speed_test = 1003;
... (output omitted)
}
Here is a complete list of available methods as of September 2023.
To simplify scripting, we develop a simple wrapper library around the gRPC API and a CLI tool to use the library in command line. It should be trivial to add functionality to the library.
Unlike sparky8512/starlink-grpc-tools, we do not make any assumptions about the format used to save data.
After having laid the groundwork to understand the next section, we now move to the measurements we performed.
Measurements and Analysis
After getting acquainted with our working environment, we run several measurements to better understand Starlink internals.
We first try to understand the possible differences in package routing between Starlink-based and default cabled connections. We then move to measure the latency and bandwidth of links, and we check whether the values for bandwidth reported from the API are the same as our machine reports. Later, we will try to understand whether we can spot physical layer influences on the latency of connections.
In the second part of our measurements, we explore the satellite part of the infrastructure. First, we implement tooling to identify satellites in line of sight of our dish and to detect patterns in satellite appearances before implementing a side-channel measurement to detect satellite handovers based on the approach Izhikevich's approach 2.
Routing
In this section, we delve into the exploration of the routing behavior in Starlink-based connections; routing refers to the process of selecting a path across one or more networks5. To investigate such topic, we use traceroutes; traceroute (8) is a tool used to diagnose problems in a network path; it is used to understand the path IP packets are taking from one computer (source IP address) to another (destination IP address).
One of the first experiments we perform is running traceroutes to several different geographically sparse targets; we retrieve a list of those from major cloud vendors,6. We are both using the traceroute (8) standard UNIX tool and a custom python script to run traceroutes and save data to CSV files.
We carefully select our target destinations from major cloud vendors. The reason behind this selection is that these cloud vendors publish their IP ranges, and their host locations are known. While the precise location of the final target in complex networks remains challenging to assess, the last hop in a traceroute often provides a reasonably accurate approximation. It is worth noting that in private networks, the hosts often do not respond to ICMP pings, further obscuring the packet's route.
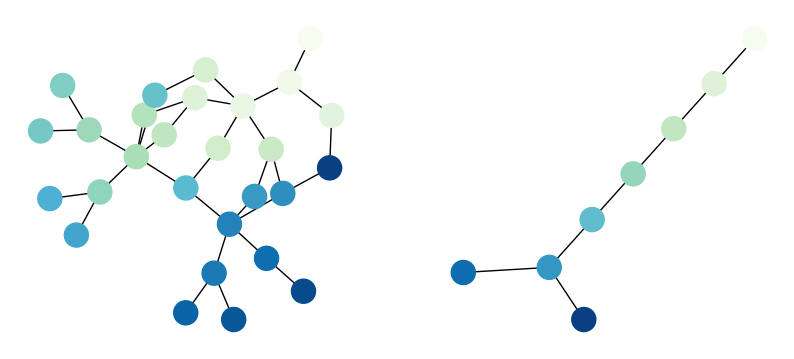
We run the traceroutes using ICMP, UDP, and TCP protocols using both the Starlink and the default network interface over several days, and we save the results to CSV files. Subsequently, we use NetworkX, a Python package for the creation, manipulation, and study of the structure, dynamics, and functions of complex networks[^25]. to visualize whether we can spot some differences in the graphs we create. The following Figures are some of the representations for traceroutes to certain specific hosts. While running traceroutes, it is common to retrieve information for the first 30 hops; however, we decided to limit ourselves to the first seven hops because we do not receive answers for further hops.
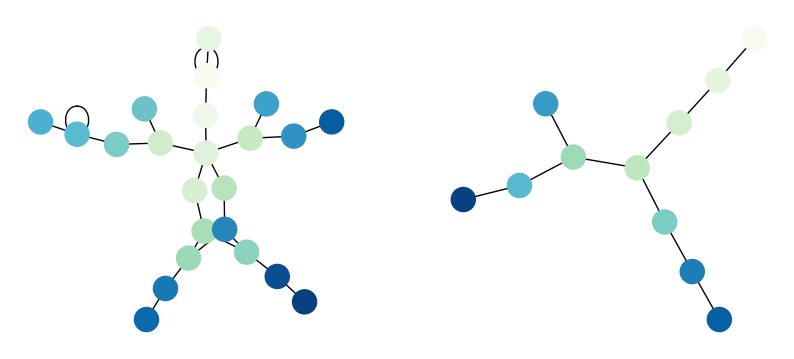 Visualizing traceroutes to 4 different hosts from AWS using ICMP, the left Figure refers to Starlink traceroutes; the right one is the cabled network interface.
Visualizing traceroutes to 4 different hosts from AWS using ICMP, the left Figure refers to Starlink traceroutes; the right one is the cabled network interface.
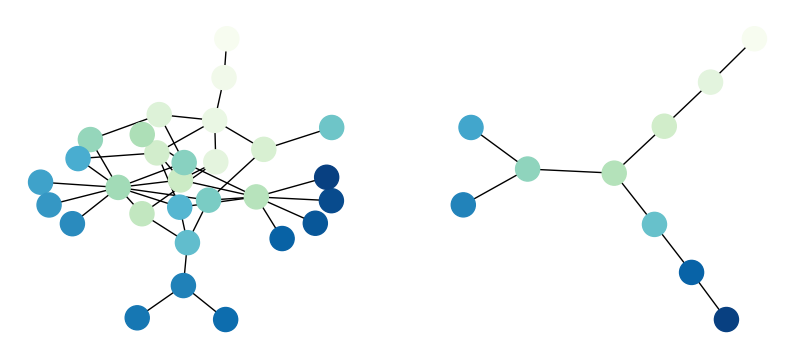 Visualizing traceroutes to 4 different hosts from AWS using UDP, the left Figure refers to Starlink traceroutes; the right is the cabled network interface.
Visualizing traceroutes to 4 different hosts from AWS using UDP, the left Figure refers to Starlink traceroutes; the right is the cabled network interface.
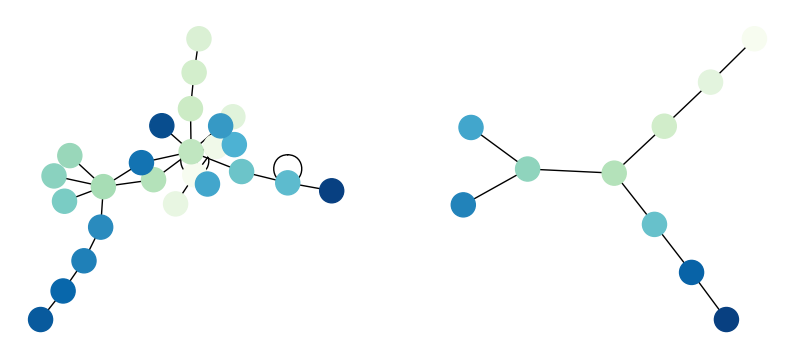 Visualizing traceroutes to 4 different hosts from AWS using TCP, the left Figure refers to Starlink traceroutes; the right is the cabled network interface.
Visualizing traceroutes to 4 different hosts from AWS using TCP, the left Figure refers to Starlink traceroutes; the right is the cabled network interface.
 Visualizing traceroutes to 4 different hosts from Azure using ICMP, the left Figure refers to Starlink traceroutes, the right one is the default network interface.
Visualizing traceroutes to 4 different hosts from Azure using ICMP, the left Figure refers to Starlink traceroutes, the right one is the default network interface.
Upon analyzing the traceroute data, it is evident that the routing within the Starlink network exhibits a notably higher degree of complexity compared to the cabled ISP network traceroutes. While the default traceroutes show data following relatively straightforward paths in four different main directions, the Starlink traceroutes display a more intricate and convoluted routing pattern. Several factors could contribute to this complexity, including diverse routing decisions and the possibility of Inter Satellite Routing within the Starlink constellation.
We are only reporting traceroutes to AWS using the three most common methods and a traceroute to Azure; more data to visualize can be found in the accompanying repository in the data folder.
We do not find any significant differences comparing traceroutes over different days; we see hops in the same Autonomous Systems; the only difference we are able to observe is that we reach different hosts inside AS14593, the Autonomous System SpaceX operates[^27].
The table below contains a list of hosts reached together and a count of how many times we reached the target.
| host | count |
|---|---|
| 206.224.65.204 | 595 |
| 206.224.65.200 | 595 |
| 206.224.65.208 | 549 |
| 206.224.65.182 | 444 |
| 206.224.65.196 | 440 |
| 206.224.65.188 | 360 |
| 206.224.65.129 | 358 |
| 206.224.65.178 | 274 |
| 206.224.65.180 | 235 |
| 206.224.65.184 | 189 |
| 206.224.65.186 | 159 |
| 206.224.65.190 | 151 |
We also see some different prefixes in later traceroutes; AS14593 advertises many.
Latency Analysis
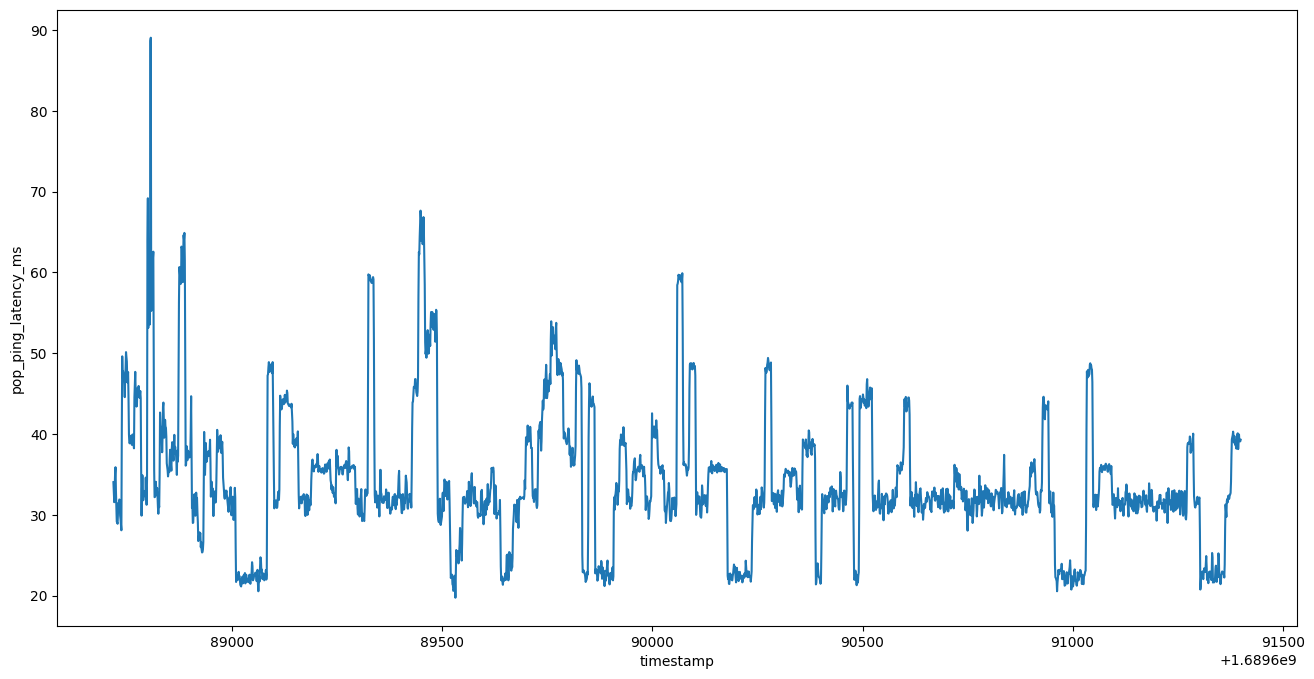
The gRPC API exposes a get_status method containing a pop_ping_latency_ms field, so we decide to measure the stability of latency to the Point of Presence (PoP) -- an artificial demarcation point or network interface point between communicating entities. A common example is an ISP point of presence, the local access point that
allows users to connect to the Internet with their Internet service provider (ISP)7.
We know that in AS14593 there are several geographically distributed hosts containing "pop" in their hostname, such as customer.dnvrcox1.pop.starlinkisp.net, the naming scheme suggests the position of the PoP we are analyzing, in the previous example it is located in Denver, Colorado. Here is a brief list of different PoPs retrieved using censys.
Latency, defined as the time it takes for data to pass from one point on a network to another8, to the PoP is pretty stable, as SpaceX reports it fluctuates around 35 milliseconds, as we can verify from figure below. We are not able to observe any patterns in latency fluctuation.
 Bandwidth visualization, with vertical red lines every 15 seconds.
Bandwidth visualization, with vertical red lines every 15 seconds.
Bandwidth analysis
During our investigations, we analyze bandwidth for two reasons: first, we want to check whether the data from the API was correct, and then we want to see whether we can detect any patterns in bandwidth drops.
The first experiment we set up is the following: We start downloading five Debian ISOs from different mirrors (to neutralize the effect of the single upload speed of a mirror). While downloading the files, we are also running a script to extract downlink throughput from the dish and measuring it simply by getting data from in order to compare the data reported from the API and the actual bandwidth our machine reports.
Figure below shows our results, bandwidth_bps is the data we obtain from , while downlink_throughput_bps is the data reported from the gRPC API. As the data reports, the two values are very similar; this suggests that the dish reports bandwidth correctly.
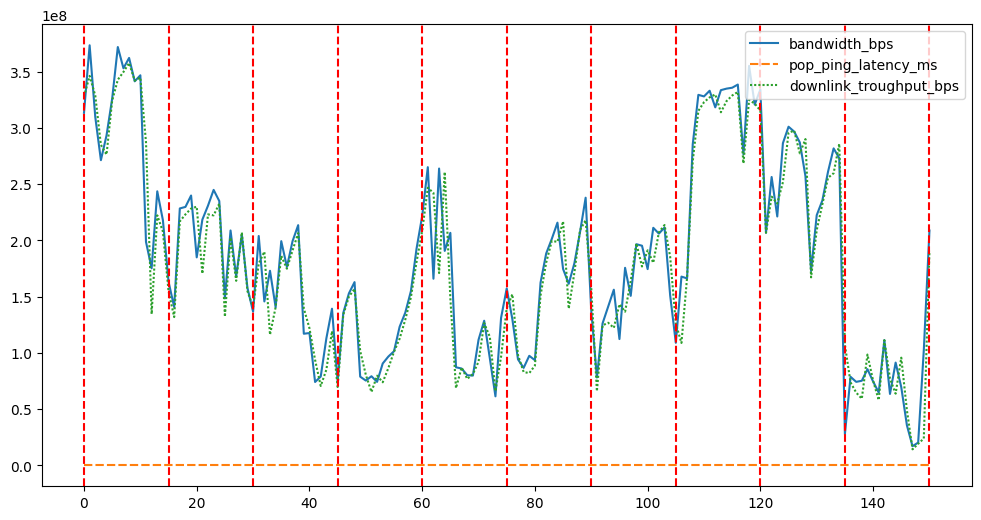 Bandwidth visualization, with vertical red lines every 15 seconds.
Bandwidth visualization, with vertical red lines every 15 seconds.
From the official LLC application, we know the dish seeks better connections, as satellites move constantly, every 15 seconds. We plot vertical lines every 15 seconds and shift them to detect whether the bandwidth drops were happening in 15-second intervals.
We repeat the experiments by shifting the red vertical lines and changing the intervals for collected data, and in the majority of cases, we see that whenever we draw a vertical red line, we have some drop in the immediate milliseconds before or after; however, drops also happen in different intervals. Initially we thought these drops might be related to satellite handovers, so we investigated further; check Section 4.7{reference-type="ref" reference="sec:sat-hand-drop"}, where we investigate the correlation between satellite handovers (retrieved using a side-channel) and drops in bandwidth. TODO: fix this check section
Physical layer influences on latency
After measuring latency and bandwidth and noticing some drops in semi-regular intervals, we decided to investigate whether the physical layer has any influences on latency in some way. Our intuition is that if this is the case, we can approximately detect whether a certain amount of data is needed before a packet is sent; this means in the best-case scenario we send the packet we want to reach the Internet exactly, it fills exactly the size window and it is sent immediately, worst-case scenario we sent the packet when the previous packet was just sent and we need to wait to fill the window before sending the packet. Of course, this operation introduces some performance drawbacks in the worst-case scenario, as the dish might have to delay transmission to wait for more data.
To verify this hypothesis, we try to send some payload with iPerf on the network interface used by Starlink. We send payloads of increasing sizes (10k, 20k, 50k, 100k, 1M, 10M) and measure the RTT. Figure below contains a visualization, as we can notice background traffic has no impact on performance.
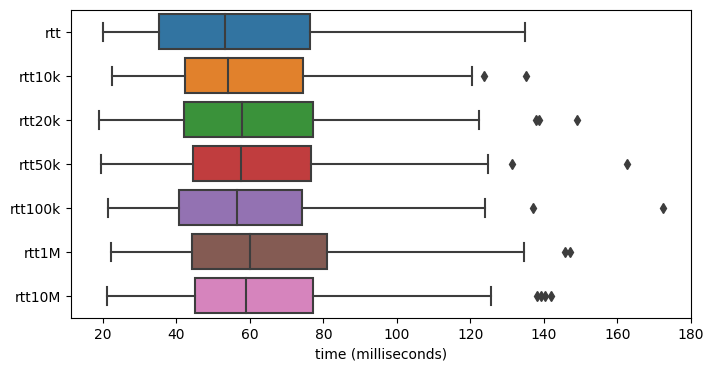 Latency variation while sending traffic on the uplink using iPerf
Latency variation while sending traffic on the uplink using iPerf
We conclude no such mechanism is enabled on the device, it might be possible other smarter and better technologies are employed and they operate at the ideal point and thus are hard to detect.
Visible Satellites
One of the first measurements we perform with satellites is to retrieve the subset of satellites the dish might be connected to.
It is up to us to define what "visible" means; in our evaluations, we decide that, knowing the satellites orbit around Earth at around 550 kilometers, it is reasonable to assume a satellite is visible when it is above the horizon and it is (point to point) not further away than 800 kilometers. The ground truth might be different, but this approximation allows us to formulate and hypothesis around satellites positions.
The first measurement we set up is the following: every 15 seconds, we run a script that retrieves all the visible satellites and stores them in a SQLite database. If we see the same satellite in the iteration before we update the timestamp otherwise, we create a new row in the database. We use a relative_ts (relative timestamp) to enumerate every measurement (a probe every 15 seconds). To measure visible satellites, we are using the common.calculate_visible_satellites function using Garching coordinates as latitude and longitude parameters and a distance of 800 Kms. The script can be found in the listing below.
def calculate_visible_satellites(
observer_latitude, observer_longitude, observer_elevation, distance_km
):
stations_url = "https://celestrak.org/NORAD/elements/gp.php?GROUP=starlink&FORMAT=tle"
satellites = load.tle_file(stations_url)
observer = Topos(observer_latitude, observer_longitude, observer_elevation)
ts = load.timescale()
t = ts.now()
# Calculate satellite positions
positions = []
for sat in satellites:
satellite = sat
position = (satellite - observer).at(t)
positions.append((sat, position))
# Filter visible satellites
visible_satellites = []
for sat, position in positions:
alt, az, distance = position.altaz()
# Satellite is above the horizon
if alt.degrees > 0 and distance.km < distance_km:
visible_satellites.append((sat, alt, az))
return visible_satellites
After collecting data for several hours, we plot satellite appearances to check whether their appearance is following some pattern; Figure below reveals this is the case; we are able to observe the same satellites every 12 hours roughly. For some satellites, we notice some artifacts that might induce to think there is a change in the pattern, but this is not true; the interval between the appearances is the same as in the other cases; we are uncertain about the reasons we are seeing this phenomenon.
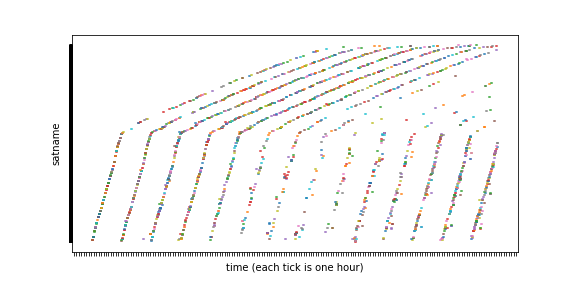 Visualizing patterns in satellite appearances, we roughly see the same satellite every 12 hours.
Visualizing patterns in satellite appearances, we roughly see the same satellite every 12 hours.
Detecting Satellite Handovers
Unfortunately, as mentioned earlier, it is impossible to know from the gRPC API which satellite the dish is connected to.
The Starlink gRPC API, however, exposes a dish_get_obstruction_map method. Following the approach described in Izhikevich's paper 2, we use the information gathered from polling the endpoint each second to extract the current obstruction map and visualize satellite handovers. This works because the dish adds a dot (setting a value to 1) in a matrix whenever it sees a satellite in that position.
The matrix is cleared whenever the dish is rebooted by setting every entry to -1; whenever a satellite is detected, the entry is set to 1.
By polling the endpoint frequently enough, we can observe satellite traces, and by comparing values in the matrices we obtain, we can detect whether a satellite handover was performed.
Let us assume the following matrices are retrieved at and , respectively. In the first matrix, we have ones in and ; in the second one, we have ones in , , . This means the new satellite we saw at is on the same path as the satellites before. Thus, NO handover was performed.
In this different case, the new satellite we see at is in a different location, so a handover must have been performed.
We can observe it is pretty easy to detect whether a handover was performed; it is sufficient to sum the two matrices and check whether the value (there was before, and we currently have ) is near an entry whose value is (at value was , and at value is ).
First, we must write a script to extract obstruction maps from the dish. To achieve this goal, we can use the api.get_obstruction_map function, which returns a JSON response similar to this:
{
"apiVersion": "9",
"dishGetObstructionMap": {
"minElevationDeg": 10.0,
"numCols": 123,
"numRows": 123,
"snr": [
-1.0,
-1.0,
-1.0,
1.0,
1.0,
-1.0,
-1.0,
1.0,
...,
1.0,
1.0,
-1.0,
-1.0,
-1.0,
-1.0
]
}
}
We can now extract the values in map["dishGetObstructionMap"]["snr"] and reshape the array in a with np.array(map).reshape(123, 123). This allows to visualize the obstruction map at any given moment; it is a matter of loading the JSON file we want to visualize and plot it with matplotlib, code can be found in Listing below toghether with the visualization and the visualization.
import json
import numpy as np
import matplotlib.pyplot as plt
f = "1692089163.json"
map = json.load(open(f))
map = map["dishGetObstructionMap"]["snr"]
map = np.array(map).reshape(123, 123)
plt.imshow(map)
plt.show()
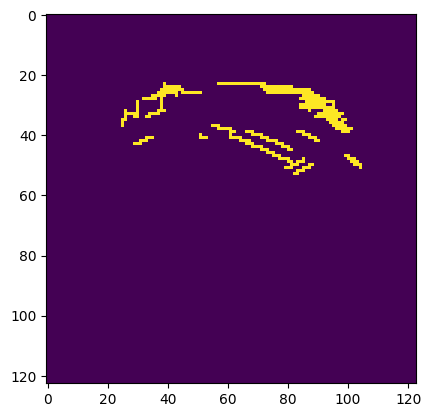 Visualizing a single obstruction map, satellite traces are clearly visible.
Visualizing a single obstruction map, satellite traces are clearly visible.
Following this approach, we can create a simple script to retrieve maps each second and save them locally; later, we can export images and create a video to better visualize the phenomenon, we have uploaded a sample video at https://www.youtube.com/watch?v=PjfMPr20suw.
Correlating Handovers and Drops in Bandwidth
We create a simple script to algorithmically detect handovers; we can use the function common.detect_handovers to detect whether a handover was performed between two subsequent snapshots; getting all the handovers is simply a matter of iterating for every JSON file we saved and running the function on each pair.
We now correlate satellite handovers (the vertical dashed lines) with the bandwidth measurements we obtained before; we assume we might have bandwidth drops during handovers.
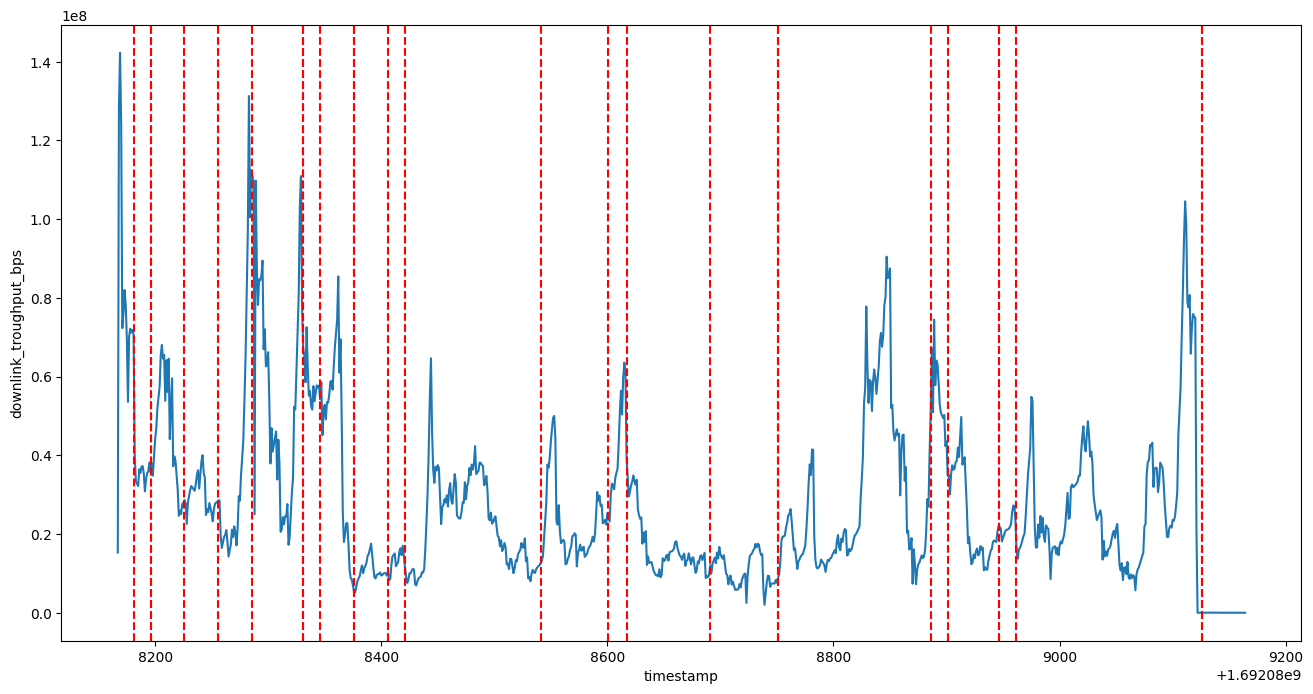 Trying to correlate satellite handovers (red vertical lines) with bandwidth measurements.
Trying to correlate satellite handovers (red vertical lines) with bandwidth measurements.
As we can verify from the figure, handovers do not seem to impact bandwidth drops. This suggests the dish is employing a sophisticated technology to perform satellite handovers without leading to a performance loss, further investigation might be needed to better understand what is enabling smooth transitions between satellites.
The measurements chapter is, for the moment, concluded; we now move to wrap up our work.
Final Remarks and Future Work
Concluding our experiments, we highlight several key insights. First, the latency to the Point of Presence remains remarkably stable and low enough even for network-intensive applications, such as online video gaming. In practice, the average customer, provided they have clear sky access, is usually more than satisfied with Starlink's performances. Bandwidth is sustained consistently, even in the presence of satellite handovers, which do not appear to impact it significantly.
Typically, a Starlink dish maintains contact with approximately eight satellites at any given moment, making autonomous decisions internally about which satellite to connect to. It is worth noting that this satellite count may vary following new launches.
Unfortunately, obtaining deeper insights into the inner workings of the Autonomous System operated by SpaceX is very hard. Hosts within this system tend not to respond to standard ping requests, and traceroute data does not always indicate the path packets take. Another well-protected link in the chain is the dish itself; many of the methods available are protected and not accessible to the end-user or are deprecated. The dish runs an SSH server, but it is impossible to connect to it as the manufacturer key pair is needed.
Notably, as of 6 October 2023, Project Kuiper has initiated its satellite launch efforts, thereby advancing its satellite constellation. By 16 October, the first two Project Kuiper satellites had been fully activated, efficiently generating power and establishing communication with the mission operations center [^kuiplaunches]. TODO check this and cite {https://www.aboutamazon.com/news/innovation-at-amazon/amazon-project-kuiper-latest-updates
Future research endeavors may include running our measurements over a more extended period. Monitoring changes in latency and observing potential alterations in traceroutes could provide valuable insights, particularly after the launch of additional satellites. Given the presence of multiple operators, unusual routing decisions may manifest in the network's path over time.
Moreover, the methodologies applied in our measurements on Starlink's dish may be adapted for use with Project Kuiper's dishes as soon as they are commercialized. While specifics about Project Kuiper's dish remain undisclosed, it is reasonable to expect it to offer a similar API for dish data access.
Additionally, exploring the implementation of an IPv6-compatible router and external access to the dish may facilitate the execution of diverse measurements, as proposed by Izhikevich et al. 2.
Another interesting topic of research are the recently added Inter Satellite Links (ISLs). Detecting whether packets are relayed between satellites can be accomplished by examining the initial hop after the Starlink Autonomous System. Using ISL routing might make it cheaper for SpaceX; it is reasonable to assume their operators might want to use their technology to do some internal routing to later exit the AS, where they have favorable agreements with other service providers.
-
corporate Roberto here :) ↩
-
Democratizing LEO Satellite Network Measurement :: Liz Izhikevich et al. - https://arxiv.org/abs/2306.07469 ↩↩↩↩↩↩
-
Measuring a low-earth-orbit satellite network :: Pan, Jianping and Zhao, Jinwei and Cai, Lin:: https://arxiv.org/abs/2307.06863 ↩
-
https://www.cloudflare.com/learning/network-layer/what-is-routing/ ↩
-
https://gstatic.com/ipranges/cloud.json, https://ip-ranges.amazonaws.com/ip-ranges.json, https://microsoft.com/en-us/download/details.aspx?id=53601, https://docs.oracle.com/en-us/iaas/tools/public_ip_ranges.json ↩
-
https://en.wikipedia.org/wiki/Point_of_presence, https://networkencyclopedia.com/point-of-presence-pop/ ↩
-
https://www.cloudflare.com/learning/performance/glossary/what-is-latency/ ↩